Introduction:
This reverse engineering project revolved around a Black&Decker Electrical Hand Screwdriver, shown in Figure 1. The processes in reverse engineering the screwdriver involved researching the tool's specifications, disassembly of the tool, examination of its parts, and a kinematic analysis to determine the motor specifications necessary to provide the desired torque output of turning a screw.

Figure 1. Exterior of electrical hand screwdriver tool
The following table of contents will direct you throughout the report on this reverse-engineering project.
| Table of Contents |
|---|
Disassembly:
After removing the screws and pin holding the screwdriver's plastic casing, the exterior plastic casing covering the gear system was readily removable.

Figure 2. Interior of plastic upper plastic casing upon first disassembly.

Figure 3. Lower planetary gear set, visible upon first disassembly.
Immediately upon viewing the interior of the screwdriver, two planetary gear sets in series were visible as seen in Figures 2 and 3. The plastic casing serves as the stationary ring gear for the entire gear system, and the lower gear set's carrier also serves as the sun gear for the upper gear set. Upon further inspection, each component of the interior was heavily lubricated, which was a surprise to see in such a small, low power, household appliance.

Figure 4. Interior of plastic casing with upper planetary gears removed.
As seen in Figure 4, removing the planetary gears shows the arm that the three gears are attached to in the upper gear set. The arm and the check can be seen to rotate at the same speed when manually turning the chuck, showing that this arm is the final output of the system being driven by the gear system.

Figure 5. Lower gear set, after removing the carrier arm.
Removing the carrier arm allowed for a comparison of the lower and upper planetary gears, which revealed them to be identical, having the same number of teeth and being made of the same plastic material. This was in contrast to the higher torque screwdriver we observed the video deconstruction of in class, which had stronger, metal gears in the upper gear set in order to better withstand the higher torque that is transmitted near the output of the screwdriver. From this design choice alone we can see the difference in material considerations necessary between weak and power tools. The sun gear attached to the motor was also the same size as the carrier sun gear, with the same number of teeth.
-Note, check on the sun gear material to see if its a weak bronze or something so you can comment on that
After the initial disassembly, I could begin to start formulating what would be necessary for kinematic analysis. It was clear from observing the motor speed that it far exceeded the speed at the chuck during operation, indicating the tool's intended purpose is to transfer a high input angular velocity to a high output torque.
Kinematic Analysis
| Gear Designation | Number of Teeth |
|---|---|
Sun | 6 |
| Planetary | 19 |
| Ring | 48 |
Figure 6. Number of teeth for each gear in the planetary gear system. Sun gear corresponds both to the motor and carrier sun gears.
To begin analyzing the transmission of torque and angular velocity throughout the gear system, the teeth numbers were obtained during disassembly and recorded above in Figure 6. Equations for planetary gear systems taught in class were then used and manipulated to obtain the relevant data needed for kinematic analysis.
Equation 1) TRS/P-R=NSun/Planet / NRing
Equation 2) TRS/P-R=(ωSun/Planet -ωarm)/(ωRing -ωarm)
Equation 3) ωSun/Planet=( TRS/P-R-1+1) * ωarm
Combining equations 1 and 2 results in equation 3, which was used to derive the angular velocities throughout the gear system, given the maximum chuck no-load angular velocity of 150 rpm given by the tool specifications obtained online. To obtain the torque throughout the system, I recognized that the geometry of the gear system mandates that the velocities at the contact point of each gears is equal, and thus angular velocity is effectively modeled by the equations 1-3. However, power losses due to friction, vibration, and heat occur across each gear, which is modeled in the equation below.
Equation 4) Pin -Plosses=Pout
Equation 5) Plosses = (1-e)*Pin
Equation 6) Pi=Pout/e
Equation 7) Pi=Ti*ωi
Equation 8) Ti=To*ωo/(e*ωi)
I chose to model the losses due to power with an efficiency value, which was obtained to be 92% for standard planetary gear sets. It is possible that the lubrication used within the screwdriver interior merits the use of a higher efficiency value by reducing friction losses, however as this was not covered within the scope of this course, I chose to use the 92% value. As the known values of the system are the output values at the chuck, calculating power inputs can be calculated by dividing the output power by the efficiency percentage. Power, as shown in equation 7, can be shown as torque multiplied by angular velocity. As angular velocity does not experience efficiency losses, using equations 6 and 7, equation 8 can be derived to solve for the torques throughout the gear system given the obtained stall torque of 26 lb-in, or 2.9376 N-m.
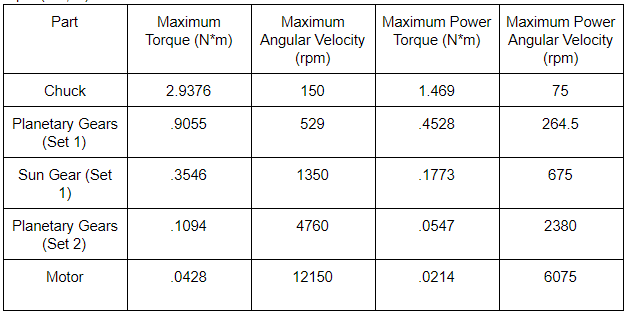
Figure 7. Obtained maximum torque, angular velocities, torque at maximum power output, angular velocity at maximum power output.
Using the Matlab

