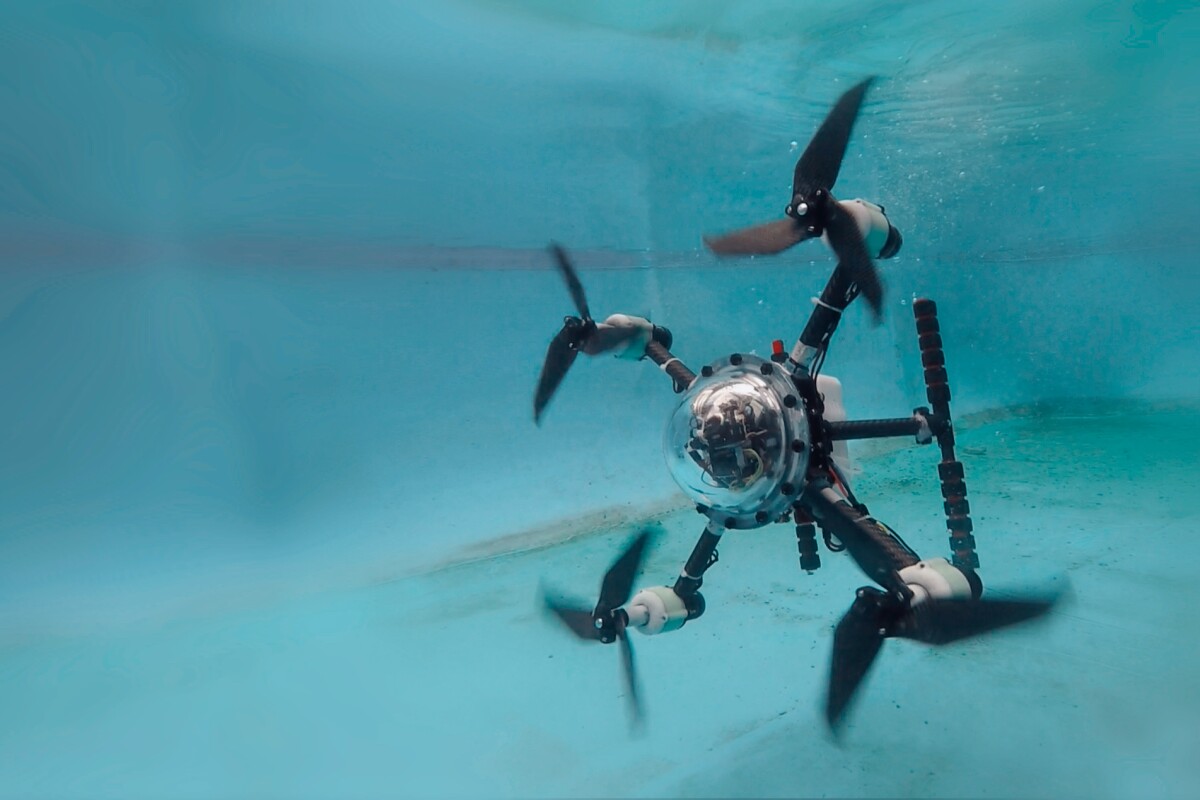
Drones have rapidly become a crucial tool in a variety of industries, from delivery services and agriculture to filmmaking and search and rescue missions. However, most drones are limited to either aerial or ground-based operations, limiting their versatility and efficiency in certain scenarios. To overcome this limitation, we propose a research project focused on developing a transforming drone arm that enables drones to operate seamlessly in the air, water, and land environments. In this project, we will investigate the feasibility of developing a multi-modal drone arm, explore the design considerations and challenges, and evaluate the performance of the mechanism. Our project involves the development of a versatile arm mechanism that enables drones to operate in the air, on land like a car, and underwater like a submarine.

| Widget Connector | ||
|---|---|---|
|
...