

...
Electronics:

MG995 Servo was used for the Gripper Mechanism.

HS-755HB Servo was used for the Arm Mechanism.

Arduino Uno was used as a microcontroller for the system.

6V AA Battery Pack was used as an external battery to power the two servos.
Wiring:
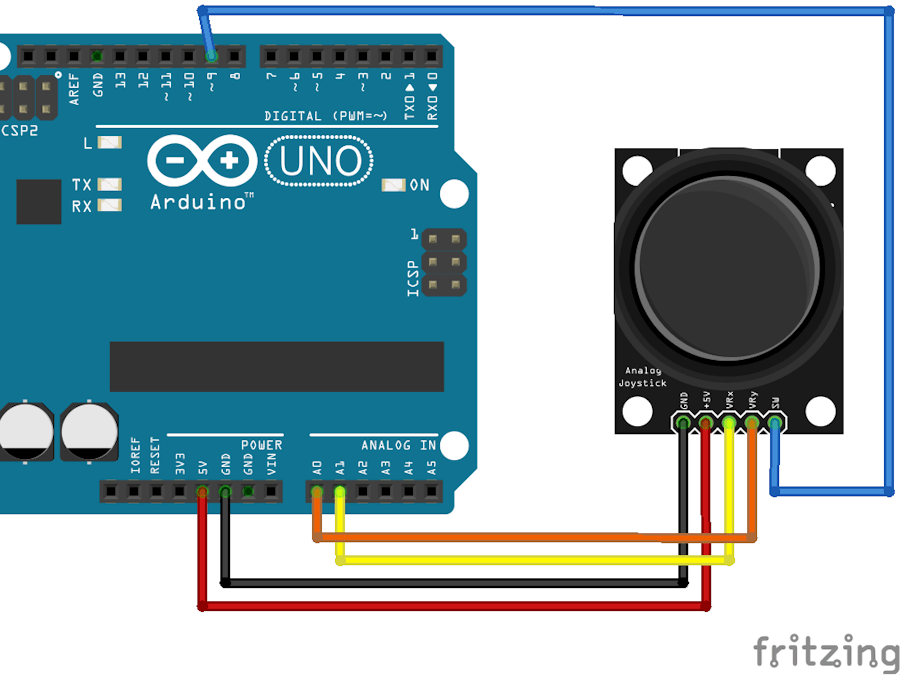
- The servos were wired up through a breadboard. (Shown Below)
- They both had common ground with the Arduino Uno but were fed power through an external power source. (Shown Below)
- The servos were controlled by PWM cables on the servos that were connected to the PWM digital pins on the Arduino Uno. (Shown Below)
- Joy Sticks were connected using analog signals to the Arduino Uno. (Shown Below)

Code:
The code is set up in a way so that the servos are fed position values depending on the position of the joystick, which is essentially a potentiometer.
The joystick outputs values in a range from 0 to 1023 and they are mapped to the desired range of servo positions.
For the gripper, it had 85 degrees of motion, while the arm had 75 degrees of motion.
