V. Electronics and Software - GRA
- Yoonseo Lee
Owned by Yoonseo Lee
Electronics:

MG995 Servo was used for the Gripper Mechanism.

HS-755HB Servo was used for the Arm Mechanism.

Arduino Uno was used as a microcontroller for the system.

6V AA Battery Pack was used as an external battery to power the two servos.
Wiring:
- The servos were wired up through a breadboard. (Shown Below)
- They both had common ground with the Arduino Uno but were fed power through an external power source. (Shown Below)
- The servos were controlled by PWM cables on the servos that were connected to the PWM digital pins on the Arduino Uno. (Shown Below)
- Joy Sticks were connected using analog signals to the Arduino Uno. (Shown Below)

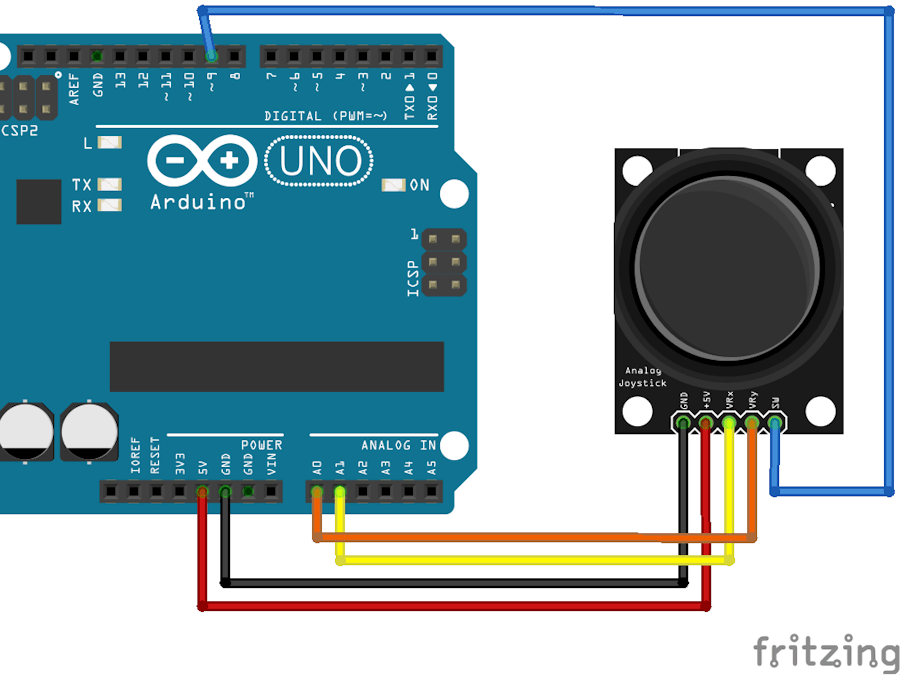
Code:
The code is set up in a way so that the servos are fed position values depending on the position of the joystick, which is essentially a potentiometer.
The joystick outputs values in a range from 0 to 1023 and they are mapped to the desired range of servo positions.
For the gripper, it had 85 degrees of motion, while the arm had 75 degrees of motion.

Welcome to the University Wiki Service! Please use your IID (yourEID@eid.utexas.edu) when prompted for your email address during login or click here to enter your EID. If you are experiencing any issues loading content on pages, please try these steps to clear your browser cache.