Background and Mechanism Overview
- Nicholas J Stich
- Conner Terry Sharpe
- Ward, Martin
Background
The idea for this project developed after the hands-on project for this class. We built a pantograph, which is a mechanism which replicates a manually input drawing at a larger scale. We enjoyed the project, but thought the mechanism could be much more interesting if instead of scaling the drawing it created the image itself. We did some background research to see if this sort of automated drawing was feasible and discovered that there were mechanisms in existence commonly called autopens which were often used by government officials to apply their signature to menial paperwork. After a bit of reading we were convinced that we could create a working version of this type of mechanism over the course of this semester.
Objective
The objective of this project was to create a mechanism which could draw the Bevo longhorn logo. The aim was to control this mechanism mechanically with only one input.
Overview
The base mechanism is a relatively simple 5-bar planar mechanism with 2 degrees of freedom. The mechanism is composed of 2 serial structures acting in parallel as can be seen in the figures below.
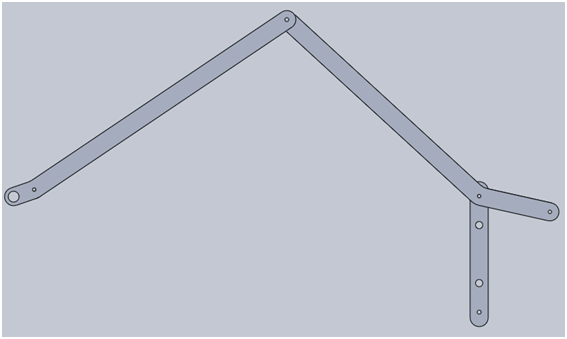


The angles of the input links, links 2 and 5, could have been easily controlled independently through the use of 2 servo motors. However, the goal of this project was to utilize a mechanical control system that only required one input. In order to achieve this goal it was necessary to use a single donut-shaped cam with 2 separate profiles, one corresponding to the angle of link 2 and one corresponding to the angle of link 5. The quality of the cam design and the smoothness of the link rotations as well as the connection of the 5-bar mechanism to the cam would determine the clarity of the output image. The general design flow of the project was simple: import the desired output image and process it appropriately; perform the kinematic inversion to obtain the angles of the input links 2 and 5 for each desired position of the pen point P; perform additional kinematic analysis to design a corresponding cam which could control the mechanism to these angles; and ensure that the manufacturing quality is sufficient to provide a smooth output curve by the pen.
Welcome to the University Wiki Service! Please use your IID (yourEID@eid.utexas.edu) when prompted for your email address during login or click here to enter your EID. If you are experiencing any issues loading content on pages, please try these steps to clear your browser cache.