PM - Design Process
- Selma Wanna
- Lucas E Gallegos III
In this project, we aimed to create something that was novel and “Interesting in terms of Kinematics”
We also wanted a complex motion, given a single simple input motion
- On the right, Figures 1 and 2 show some ideas that we had early on in the design process
- Ultimately, we ended up going with the design in figure 3 upon considering the various manufacturing contingencies that we would likely face in the designs shown in Figures 1 and 2.
- Some of which included: undesirable toggle positions, non-constant forces on sliding joints, and the inability to incorporate standard components.
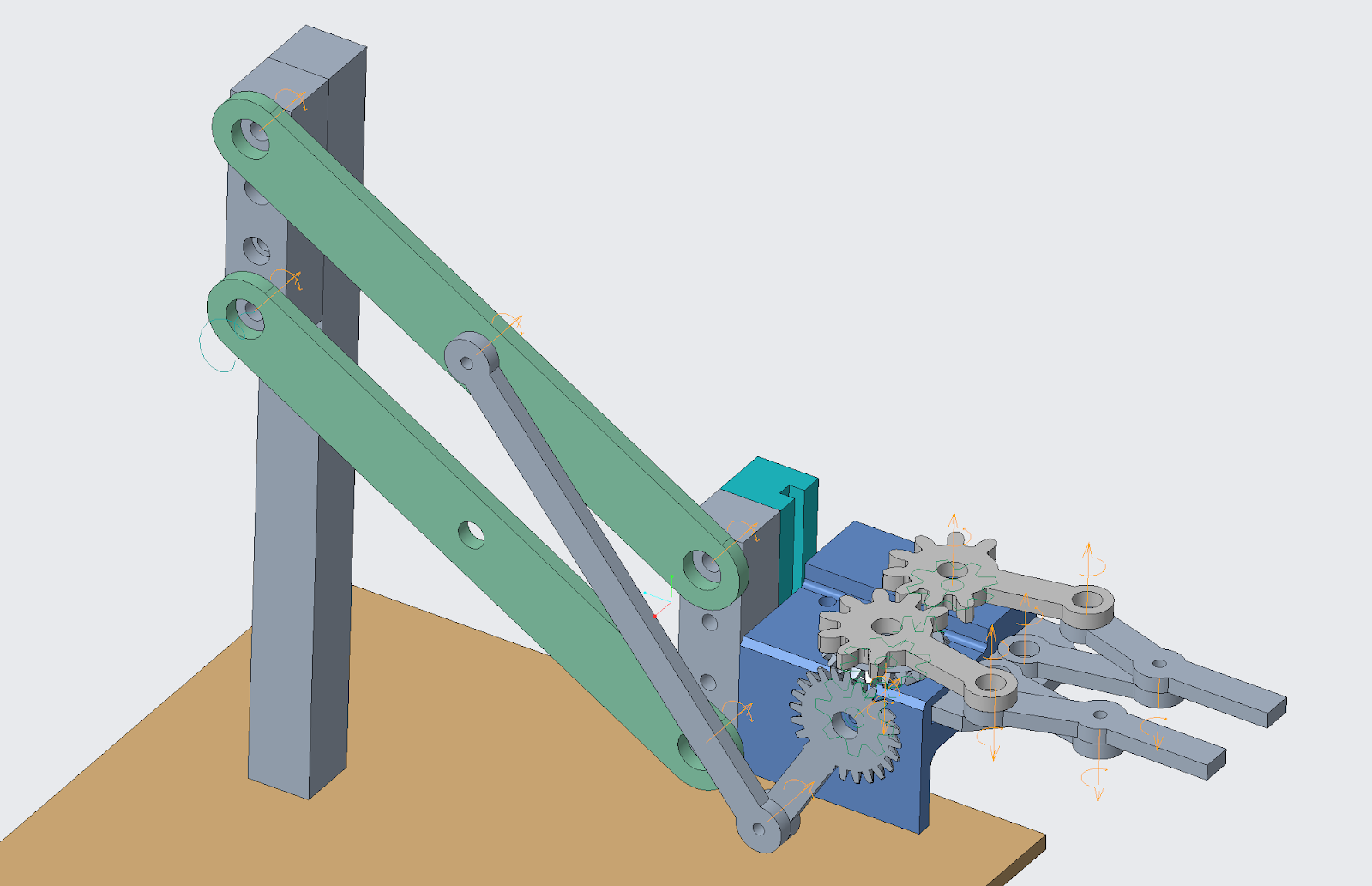
Once we decided on the design that we were going with, we utilized CREO Parametric (CAD) Software Simulations which proved to be essential in the design process
Within the Software we used the "Mechanism" Application. This application allowed us to create physical constraints such as pin joints and and gears in an effort to perform motion simulations
In the video below, we were using this "Mechanisms" application to do Motion Synthesis in 3-D
In doing this "virtual" motion synthesis, it allowed us to get a good visual idea of how our Mechanism was going to move
In other words, it provided an empirical means to evaluate the position and physical constraints visually before we performed a more rigorous kinematic analysis using Matlab (discussed in the next section).
Throughout this design process, we placed great emphasis on “lessons learned” from the slider crank
Some of these lessons included:
- Reducing redundancies in terms of bearings and only using one bearing per joint
- Mitigate torsional forces on the ground link by using higher strength aluminum extrusions (1"x1" 80/20 inc.)
- Avoiding laser cutting if at all possible (discussed in the next section)
3. Final Design
All CAD files can be found on our github: https://github.com/SouLeo/RobotMechanismDesign/tree/master/FinalProject/CAD

1. Initial Concept

2. Second Iteration
Welcome to the University Wiki Service! Please use your IID (yourEID@eid.utexas.edu) when prompted for your email address during login or click here to enter your EID. If you are experiencing any issues loading content on pages, please try these steps to clear your browser cache.