Introduction & Background of MMTDAM
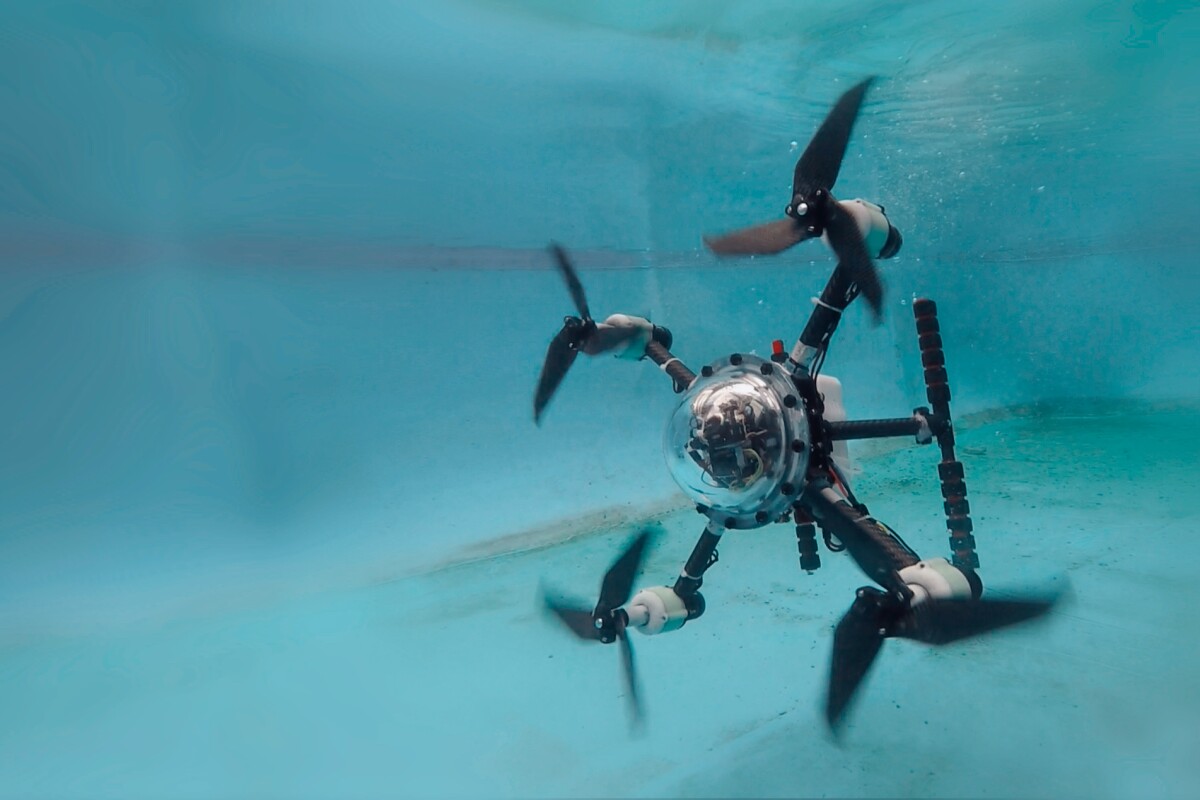
Drones have rapidly become a crucial tool in a variety of industries, from delivery services and agriculture to filmmaking and search and rescue missions. However, most drones are limited to either aerial or ground-based operations, limiting their versatility and efficiency in certain scenarios. To overcome this limitation, we propose a research project focused on developing a transforming drone arm that enables drones to operate seamlessly in the air, water, and land environments. In this project, we will investigate the feasibility of developing a multi-modal drone arm, explore the design considerations and challenges, and evaluate the performance of the mechanism. Our project involves the development of a versatile arm mechanism that enables drones to operate in the air, on land like a car, and underwater like a submarine.

Drones have been widely used in various industries, including aerial photography, surveillance, and surveying. However, as most drones are designed primarily for aerial operations, they are limited in their functionality, especially when it comes to tasks that require operation in other environments, such as aquatic or terrestrial environments. For example, search and rescue missions in coastal areas or marine environments require drones to be able to land on the water and navigate underwater to search for survivors. Similarly, in agricultural applications, drones may need to land on crops or fields to collect samples or perform soil analysis. To overcome these limitations, researchers and engineers have been exploring the development of multi-modal drones that can operate in multiple environments using a single mechanism. The concept of transforming drone arms has emerged as a potential solution to enable multi-modal drone operation. By developing a transforming drone arm that can switch between different modes of operation, drones can be adapted to a wider range of applications and environments. However, designing and implementing a transforming drone arm presents several challenges, including the need for a lightweight and compact mechanism that can withstand variable conditions. In this project, we aim to address these challenges and develop a transforming drone arm that can enable multi-modal drone operation for a range of applications.
Welcome to the University Wiki Service! Please use your IID (yourEID@eid.utexas.edu) when prompted for your email address during login or click here to enter your EID. If you are experiencing any issues loading content on pages, please try these steps to clear your browser cache.